
Senin, 31 Oktober 2011
di
22.00
|
jika kita berbicara kontrol robot line follower dengan PID maka bukanlah kontrol PID yang sebenarnya… sebab (kata dosenku) pada robot line follower elemen ukur (sensor) tidak terdapat pada plant (motor penggerak) dari robot, yang serharusnya ialah sensor terdapat di plant(motor penggerak), dengan contoh tachometer sebagai sensor pada motor, encoder atau yang laennya yang terletak pada plant. sedangkan pada robot line follower sensor berupa pendeteksi garis (tidak terletak pada plant) dan dari hasil kondisi garis tersebut barulah dikontrol ke motor (plant), namun walaupun begitu kontrol PID masih dapat diterapkan untuk mengendalikan robot line follower.
Blok aksi kontrol PID:

 Dari formula tersebut dapat dirumuskan menjadi pen-digitalization PID dengan berbagai metode, kalo di kul dengan cara transformasi Z, ZOH, bilinier transformartion, Eulers method.. wah susah pokoknya…. Sehingga diperoleh bentuk digital diskritnya menjadi persamaan dibawah ini….
Dari formula tersebut dapat dirumuskan menjadi pen-digitalization PID dengan berbagai metode, kalo di kul dengan cara transformasi Z, ZOH, bilinier transformartion, Eulers method.. wah susah pokoknya…. Sehingga diperoleh bentuk digital diskritnya menjadi persamaan dibawah ini….
Bentuk kontroler PID diskrit:
 Nach…jika kita terapkan dalam bahasa pemrograman menjadi….
Nach…jika kita terapkan dalam bahasa pemrograman menjadi….

Dimana; Ts ialah time sampling, error ialah nilai kesalahan dan last_error ialah nilai error sebelumnya.
Berikut ilustrasi penerapan kontrol PID pada robot line follower:

dari blok iliustrasi tersebut dapat q jelasin sebagai berikut:
S1,S2…,S8 merupakan sensor dengan pemberian bobot Present Value (PV) PV=0, PV=-1, PV= 1 dst….
 Deviasi/simpangan antar variabel terukur (PV) dengan nilai acuan (SP) disebut error (galat)
Deviasi/simpangan antar variabel terukur (PV) dengan nilai acuan (SP) disebut error (galat)
 Nach nilai error dari pembacaan sensor ini yang dijadikan aksi perhitungan kendali PID, lalu nilai perhitungan PID tersebut dijumlahkan dengan setpoint PWM untuk dijadikan sebagai nilai aktual PWM motor dari robot line follower, berikut formula perhitungan nilai PWM kiri dan kanan dari robotku:
Nach nilai error dari pembacaan sensor ini yang dijadikan aksi perhitungan kendali PID, lalu nilai perhitungan PID tersebut dijumlahkan dengan setpoint PWM untuk dijadikan sebagai nilai aktual PWM motor dari robot line follower, berikut formula perhitungan nilai PWM kiri dan kanan dari robotku:





 Tampilan LCD saat Set Garis
Tampilan LCD saat Set Garis
 Tampilan LCD setelah kita menset garis hitam
Tampilan LCD setelah kita menset garis hitam
4. Start Robot
 Robot akan dijalankan
Robot akan dijalankan

Blok aksi kontrol PID:

Formula matematis dari PID:
 Dari formula tersebut dapat dirumuskan menjadi pen-digitalization PID dengan berbagai metode, kalo di kul dengan cara transformasi Z, ZOH, bilinier transformartion, Eulers method.. wah susah pokoknya…. Sehingga diperoleh bentuk digital diskritnya menjadi persamaan dibawah ini….
Dari formula tersebut dapat dirumuskan menjadi pen-digitalization PID dengan berbagai metode, kalo di kul dengan cara transformasi Z, ZOH, bilinier transformartion, Eulers method.. wah susah pokoknya…. Sehingga diperoleh bentuk digital diskritnya menjadi persamaan dibawah ini….Bentuk kontroler PID diskrit:
 Nach…jika kita terapkan dalam bahasa pemrograman menjadi….
Nach…jika kita terapkan dalam bahasa pemrograman menjadi….Dimana; Ts ialah time sampling, error ialah nilai kesalahan dan last_error ialah nilai error sebelumnya.
Berikut ilustrasi penerapan kontrol PID pada robot line follower:

dari blok iliustrasi tersebut dapat q jelasin sebagai berikut:
S1,S2…,S8 merupakan sensor dengan pemberian bobot Present Value (PV) PV=0, PV=-1, PV= 1 dst….



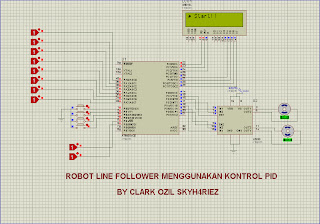
untuk robot lf PID ini, ane menggunakan softwre simulasi proteus 7.8 yg bs di download di internet.ckckkckkc
komponennya sebenarnya tidak berbeda dengan LF analog,cuma ada tambahan :
1. Sistem Minimum Mikrokontroller ATMega 32
2. 10 buah sensor garis ( 8 buah sensor tersusun secara array,dan 2 sensor di tengah)
3. Driver Motor
4. Motor Dc
Gambar Rangkaiannya :

Cara menjalankan PID nya yaitu :
1. Pertama kita set PID nya
- Set Kp
- Set Ki
- Set Kd

Tampilan di LCD pada saat ingin mengatur PID

Tampilan Saat nilai Kp,Ki,Kd untuk PID telah diatur
2. Set Kecepatan Motor
Tampilan Pada LCD Saat Atur Kecepatan Motor

Tampilan LCD setelah Nilai Min dan Max kecepatan motor setelah kita atur
3. Set Warna Garis
maksudnya garis yang kita telusuri atau hitam


4. Start Robot

5. Motor pada robot akan berjalan sesuai PID yang diatur

Sekian Terima KAsih
bagi yang pengen skematik n list progarmnya hbgi admin
Diposting oleh
skywalker



{kind=link}
0 komentar:
Posting Komentar